Background
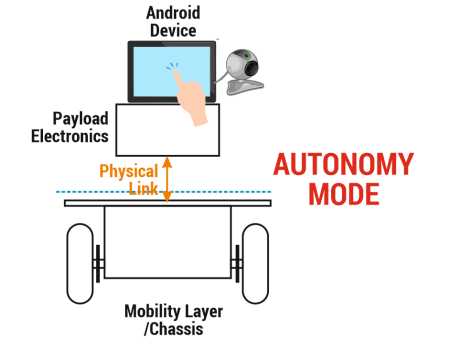
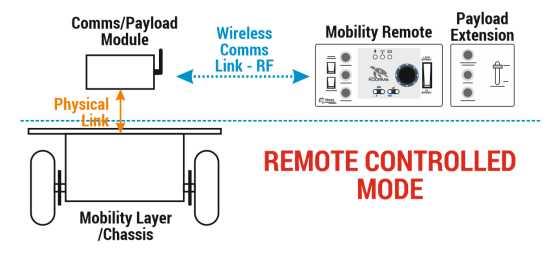
Koorma is a robotic mobility chassis designed to have open and extensible interfaces so payloads can be designed and integrated easily. It is designed for mostly outdoor work and payloads, and an IP Compliant chassis which can handle reasonably rough terrains. The chassis can be extended with Payloads that can operate in Autonomy Mode or Remote Controlled Mode or a mix of both.
The Koorma Chassis is driven by our own Proprietary "Drive By Wire" technology for both the hardware and software aspects of this vehicle.
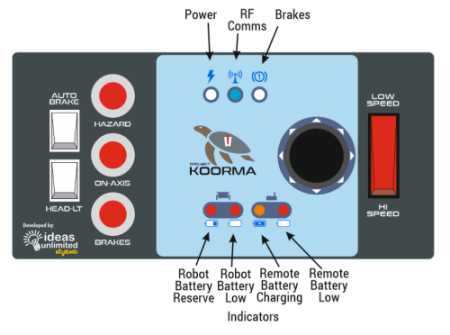
The remote control and communication systems on board can be customized to communicate through a variety of Communicatio protocols like WiFi, Bluetooth, RF and 4G/5G as well. The Remote control interface can also be extended with Payload specific controls interface so same RF communication link and infrastructure can be used for controlling payload too.
This product from the scratch was designed and developed at our lab in Mysuru, India.
Also visit following pages which provide more info about Koorma platform:
- Project KOORMA - Smart features of the Koorma Platform
- Project Koorma - Weed cutter Payload

 Site Navigation
Site Navigation